Xingxing Zuo
Assistant Professor at MBZUAI.

I’m an Assistant Professor (tenure-track) in the Robotics Department at MBZUAI, where I lead the Robotics Cognition and Learning (RCL) Group. Prior to this, I was a Postdoc in the Department of Computing and Mathematical Sciences at Caltech, working with Prof. Soon-Jo Chung. In 2023, I worked as a full-time Visiting Faculty Researcher (Scientist) at Google in the United States. From 2021 to 2023, I was a Postdoctoral Researcher at the Technical University of Munich in Germany, working with Prof. Stefan Leutenegger. Between 2019 and 2021, I was an academic guest in the Department of Computer Science at ETH Zurich in Switzerland, working with Prof. Marc Pollefeys. I also held visiting scholar positions at the University of Delaware, USA (2018), and the University of Technology Sydney, Australia (2017). I received my Ph.D. in 2021 from Zhejiang University in China, graduating with honors under the supervision of Prof. Guoquan (Paul) Huang and Prof. Yong Liu. I earned my Bachelor’s degree also with honors, from the University of Electronic Science and Technology of China (UESTC), Chengdu, China, in 2016.
I am hiring highly motivated PhD students, research assistants, visiting graduate students and Postdocs. Please check this page (or Chinese version) for more details! For application, please send an email to me via xingxingzuo[at]outlook.com with the subject “[Position]+[Name]+[Affiliation]”!

research interests
My research interests include robot perception, hand-object interaction, state estimation, 3D computer vision, SLAM, mobile manipulation, dexterous manipulation, VLN/VLA, spatial AI and embodied AI.
My long-term research vision is to enable natural interaction and seamless collaboration between robots and humans in open environments by accurately understanding robot states, surrounding 3D scenes, and action execution.
news
| Jul 25, 2026 | Our work “Gaussian_LIC2” is accepted by IJRR! 🎉🎉🎉 |
|---|---|
| Jun 1, 2026 | Our work on humanoid whole-body control “M3imic” is accepted by RA-L! |
| Jun 1, 2026 | Our workshop MM-Spatial AI Workshop at ICRA 2026 has successfully concluded! |
| Apr 27, 2026 | Two papers accepted by RSS 2026! |
| Jan 12, 2026 | Our work about Flying Co-Stereo is accepted by T-RO! |
| Jan 11, 2026 | Our workshop proposal for Multi-Modal Spatial AI is accepted by ICRA 2026. See you in Vienna! |
| Nov 16, 2025 | Thrilled to be appointed as an Area Chair for the top conference RSS 2026! |
| Oct 8, 2025 | Thrilled to be appointed as an Associate Editor for the prestigious journal T-RO! |
| Sep 12, 2025 | Serving as an Associate Editor for ICRA 2026, my fourth consecutive year handling ICRA submissions! |
| Sep 3, 2025 | “PG-SLAM” about dynamic SLAM is accepted by T-RO! |
| Jul 9, 2025 | Our work “Gaussian_LIC2” is unveiled on Arxiv! |
| Jun 27, 2025 | ROEVO about edge feature-based SLAM is accepted by T-RO! |
| May 31, 2025 | Our work “Flying Co-Stereo” is unveiled on Arxiv! |
| May 1, 2025 | Excited to join the Robotics Department at MBZUAI to start my faculty adventure! |
| Jan 27, 2025 | Gaussian-LIC is accepted by ICRA 2025! |
academic services
Journal Associate Editor: IEEE Transactions on Robotics (T-RO, from January 2026), IEEE Robotics and Automation Letters (RA-L, since March 2022)
Conference Associate Editor / Area Chair: Robotics: Science and Systems (RSS, 2026), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS, 2022&2023&2024&2025), IEEE International Conference on Robotics and Automation (ICRA, 2023&2024&2025&2026).
Workshop Organizer: Multi-Modal Spatial AI in ICRA 2026; Thermal Infrared in Robotics in ICRA 2025.
Program Committee / Area Chair: IEEE MOST 2025; ICRA 2025 Workshop on Foundation Models and Neuro-Symbolic AI for Robotics
Conference Session Chair: IROS 2023.
Guest Editor: Sensors [Special Issue 2023].
Journal Reviewer: IEEE Transactions on Robotics (T-RO), The International Journal of Robotics Research (IJRR), Journal of Field Robotics (J-FR), IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), IEEE Transactions on Automation Science and Engineering (T-ASE), IEEE Robotics and Automation Letters (RA-L), IEEE Transactions on Intelligent Transportation Systems (T-ITS), IEEE Transactions on Industrial Electronics (T-IE), Neurocomputing.
Conference Reviewer: ICRA, IROS, CVPR, ICCV, ECCV, IJCAI
representative talks
- 2026.07 Keynote talk on “Spatial Intelligence for Open-World Autonomy”. Human-Centric Mobile Manipulation Workshop, on RSS 2026 (Sydney).
- 2026.05 Keynote talk on “Scaling Robot Learning”. Symposium on Emboded AI, MBZUAI (Abu Dhabi).
- 2026.04 Keynote talk on “Towards Spatially Intelligent Robots”. CERO, NYU (New York).
- 2025.03 A talk about “Spatial Intelligent Robots”. Virginia Tech (Blacksburg).
- 2025.03 A talk about “Spatial Intelligent Robots”. KAUST (Saudi Arabia).
- 2025.01 A talk about “Robust 3D Perception”. MIT (Boston).
- 2023.08 A talk about “Robust 3D Perception”. The Chinese University of Hong Kong (ShenZhen).
- 2023.05 A talk about “Robust 3D Perception”. Upenn Grasp Lab.
- 2022.06 “Robust 3D Perception with Multi-source Information Fusion”. ETH CVG group.
- 2022.03 Invited speaker at conference, “Towards the Era of Robust Pose Estimation for Robots”. UPLINLIBS 2022.
- 2022.03 “Towards the Era of Robust Spatial Perception”. Peking University.
selected publications
Find out my full publication list via Google Scholar.
* co-first author with equal contribution; # Corresponding author.
-
 M3imic: Learning a Versatile Whole-Body Controller for Multimodal Motion Mimicking IEEE Robotics and Automation Letters (RA-L) 2026 [Abs] [arXiv] [Video] [Code]
M3imic: Learning a Versatile Whole-Body Controller for Multimodal Motion Mimicking IEEE Robotics and Automation Letters (RA-L) 2026 [Abs] [arXiv] [Video] [Code] -
 Gaussian-LIC2: LiDAR-Inertial-Camera Gaussian Splatting SLAM The International Journal of Robotics Research (IJRR) 2026 [Abs] [arXiv] [Webpage] [Code]
Gaussian-LIC2: LiDAR-Inertial-Camera Gaussian Splatting SLAM The International Journal of Robotics Research (IJRR) 2026 [Abs] [arXiv] [Webpage] [Code]


-
 SimGenHOI: Physically Realistic Whole-Body Humanoid-Object Interaction via Generative Modeling and Reinforcement Learning arXiv preprint arXiv:2508.14120 2025 [Abs] [arXiv] [Webpage]
SimGenHOI: Physically Realistic Whole-Body Humanoid-Object Interaction via Generative Modeling and Reinforcement Learning arXiv preprint arXiv:2508.14120 2025 [Abs] [arXiv] [Webpage] -
 Flying Co-Stereo: Enabling Long-Range Aerial Dense Mapping via Collaborative Stereo Vision of Dynamic-Baseline arXiv preprint arXiv:2506.00546 2025 [Abs] [arXiv] [Webpage]
Flying Co-Stereo: Enabling Long-Range Aerial Dense Mapping via Collaborative Stereo Vision of Dynamic-Baseline arXiv preprint arXiv:2506.00546 2025 [Abs] [arXiv] [Webpage]
-
 FMGS: Foundation Model Embedded 3D Gaussian Splatting for Holistic 3D Scene Understanding International Journal of Computer Vision (IJCV) 2024 [Abs] [arXiv] [Webpage] [Code]
FMGS: Foundation Model Embedded 3D Gaussian Splatting for Holistic 3D Scene Understanding International Journal of Computer Vision (IJCV) 2024 [Abs] [arXiv] [Webpage] [Code] -
 RadarCam-Depth: Radar-Camera Fusion for Depth Estimation with Learned Metric Scale IEEE International Conference on Robotics and Automation (ICRA) 2024 [Abs] [arXiv] [Video] [Code]
RadarCam-Depth: Radar-Camera Fusion for Depth Estimation with Learned Metric Scale IEEE International Conference on Robotics and Automation (ICRA) 2024 [Abs] [arXiv] [Video] [Code]

-
 Coco-LIC: Continuous-Time Tightly-Coupled LiDAR-Inertial-Camera Odometry using Non-Uniform B-spline IEEE Robotics and Automation Letters 2023 [Abs] [arXiv] [Video] [Code]
Coco-LIC: Continuous-Time Tightly-Coupled LiDAR-Inertial-Camera Odometry using Non-Uniform B-spline IEEE Robotics and Automation Letters 2023 [Abs] [arXiv] [Video] [Code] -
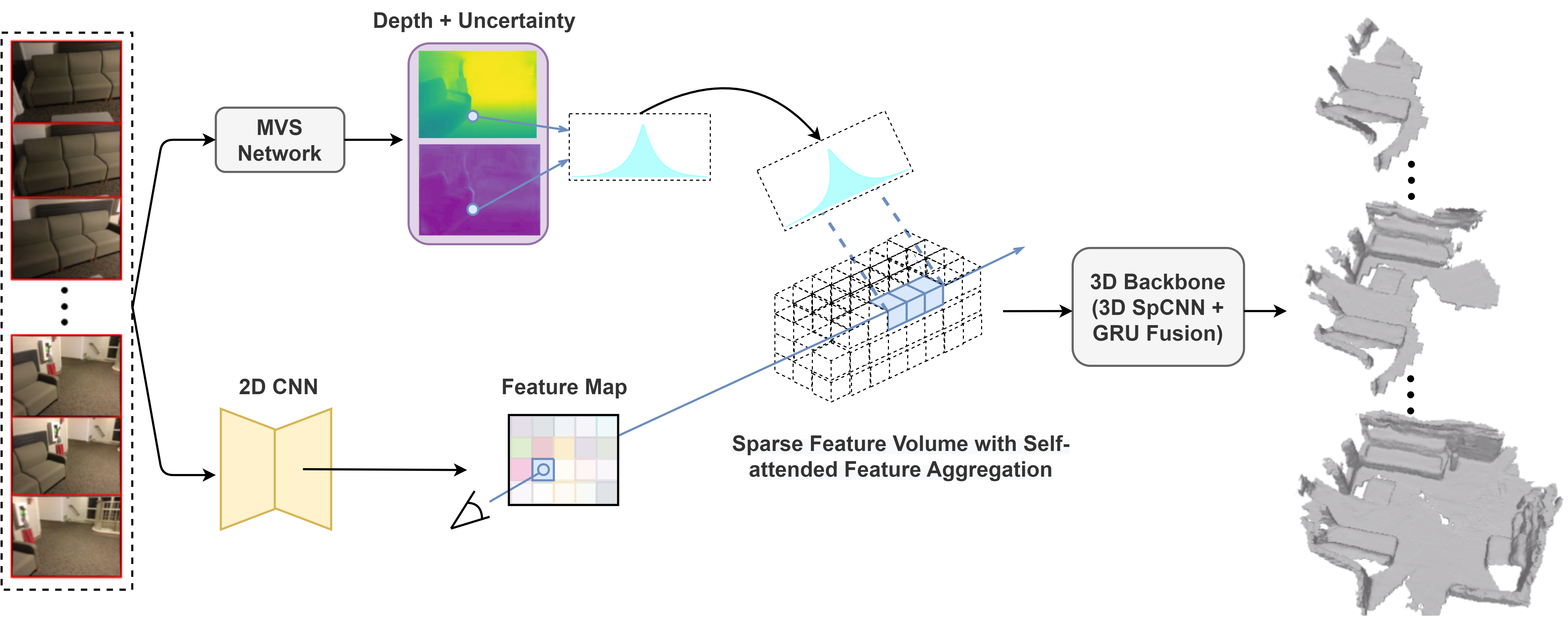 Incremental Dense Reconstruction from Monocular Video with Guided Sparse Feature Volume Fusion IEEE Robotics and Automation Letters 2023 [Abs] [arXiv] [Video]
Incremental Dense Reconstruction from Monocular Video with Guided Sparse Feature Volume Fusion IEEE Robotics and Automation Letters 2023 [Abs] [arXiv] [Video] -
 Continuous-Time Fixed-Lag Smoothing for LiDAR-Inertial-Camera SLAM IEEE/ASME Transactions on Mechatronics 2023 [Abs] [arXiv] [Code]
Continuous-Time Fixed-Lag Smoothing for LiDAR-Inertial-Camera SLAM IEEE/ASME Transactions on Mechatronics 2023 [Abs] [arXiv] [Code]
-
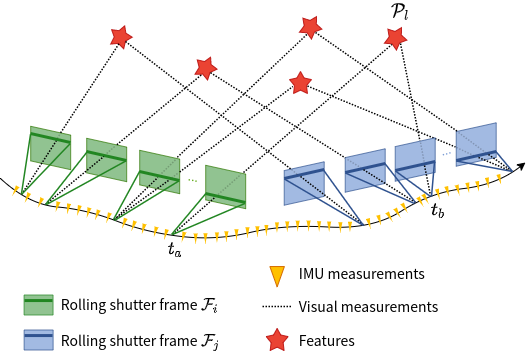 Ctrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter Cameras IEEE Robotics and Automation Letters 2022 [Abs] [arXiv] [Code]
Ctrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter Cameras IEEE Robotics and Automation Letters 2022 [Abs] [arXiv] [Code] -
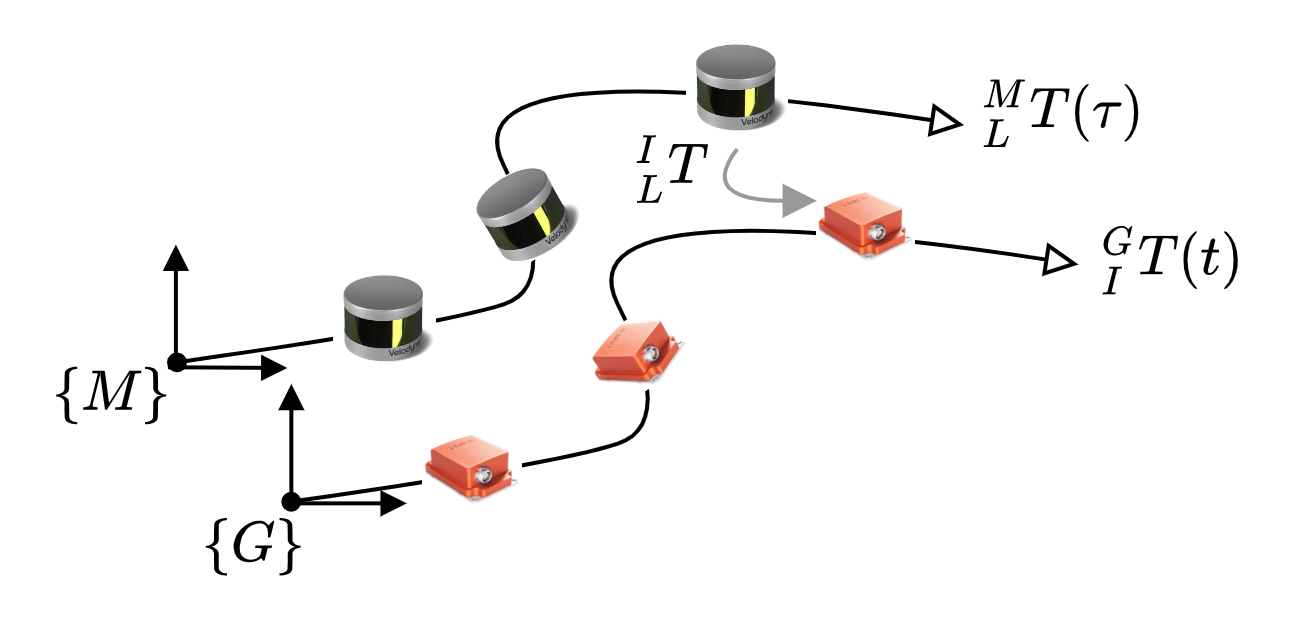 Observability-Aware Intrinsic and Extrinsic Calibration of LiDAR-IMU Systems IEEE Transactions on Robotics 2022 [Abs] [arXiv] [Code]
Observability-Aware Intrinsic and Extrinsic Calibration of LiDAR-IMU Systems IEEE Transactions on Robotics 2022 [Abs] [arXiv] [Code] -
 Symmetry and Uncertainty-Aware Object SLAM for 6DoF Object Pose Estimation IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2022 [Abs] [arXiv] [Code]
Symmetry and Uncertainty-Aware Object SLAM for 6DoF Object Pose Estimation IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2022 [Abs] [arXiv] [Code]
-
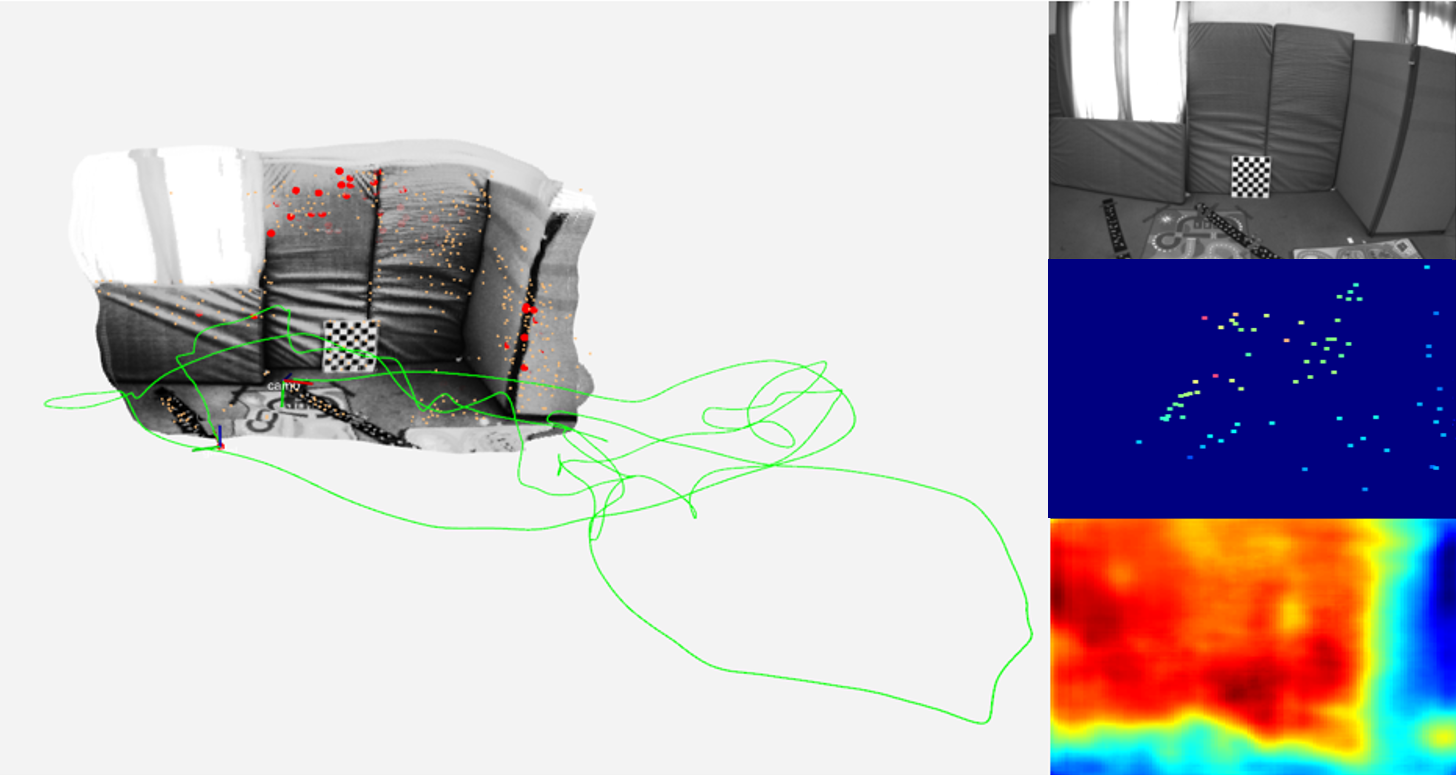 CodeVIO: Visual-inertial odometry with learned optimizable dense depth Nominated for the "Best Paper Award in Robot Vision (Finalist) of ICRA 2021", IEEE International Conference on Robotics and Automation (ICRA) 2021 [Abs] [arXiv] [Video]
CodeVIO: Visual-inertial odometry with learned optimizable dense depth Nominated for the "Best Paper Award in Robot Vision (Finalist) of ICRA 2021", IEEE International Conference on Robotics and Automation (ICRA) 2021 [Abs] [arXiv] [Video]